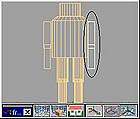
| page 3-2 三、檢查連結是否正確 請利用鍵盤的「上下左右」鍵,可以在機器人的各部份行走,而選取到所要的部份,被選到的部份會成為白色,而同一模型中的其他部份會成為橘色。其中,按下「↓」鍵,可以往「下層」走,而按下「←」鍵或「→」鍵,可以在「同一層」走。 例如,你按下一次「↓」鍵,便可以選到頭部(頭部成為白色),而身體、手臂、和腳為橘色,然後你按下「←」鍵,就可以選到「身體、手臂、和腳」,而頭部成為橘色。於是你可以繼續「往下走兩次」,並配合←鍵,來選到一隻手臂,如圖:
當然,你也要能夠選到其他部份,如右手、左腳等。 使用上下鍵與左右鍵的方法,可以檢查我們的連結方式是否正確,重要的觀念在於:我們必須要能夠選到「有局部動畫」的部份,例如:我們必須要能選到頭(會搖頭、點頭)、一隻手臂(會擺動、揮拳、行禮)、一隻腳(會走路、踢腿)。當然也要能夠選到小腿,才能做單腳獨立或踢小腿的動作。 另外,如果你也設計了手掌和手指,那麼也必須要能夠各別選到手掌和手指,才能做到握拳和伸手指頭的動作。 四、設定軸心 在開始設計動畫之前,要先設定各個部份的軸心,比如說,機器人前進時,手臂會擺動,腳也會旋轉、彎曲,但是在設計這些「擺動、旋轉、彎曲」的動畫時,你必須先把這些各別物件(大手臂、小手臂,還有大腿、小腿)的軸心定在正確的位置,否則擺動或旋轉時,可能會產生「肢」離破碎的奇怪、錯誤現象。
|